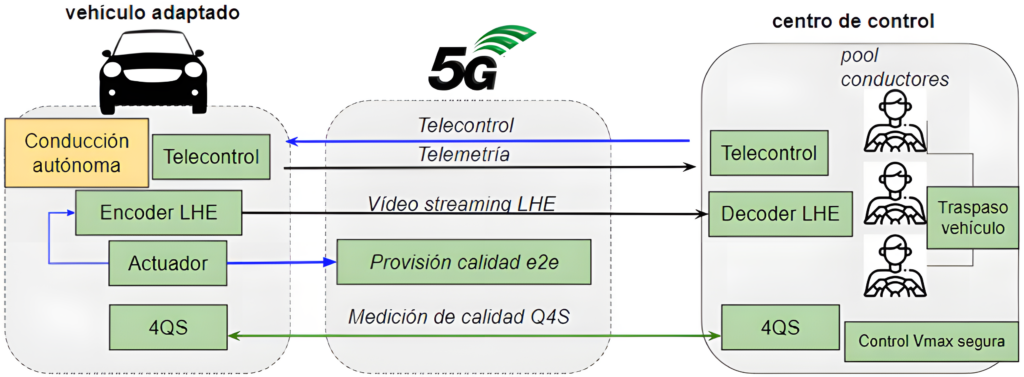
La arquitectura del proyecto se compone de varios subsistemas interconectados que trabajan de manera coordinada para asegurar un funcionamiento eficiente y seguro del sistema global. Cada subsistema tiene una función específica, desde la captura y procesamiento de video, la medición y actuación de variables en tiempo real, hasta la adaptación del vehículo y la supervisión centralizada desde el centro de control. La interacción dinámica entre estos subsistemas permite una operación precisa, tanto para el control del vehículo como para la toma de decisiones automatizadas, garantizando una experiencia óptima y segura para el usuario.
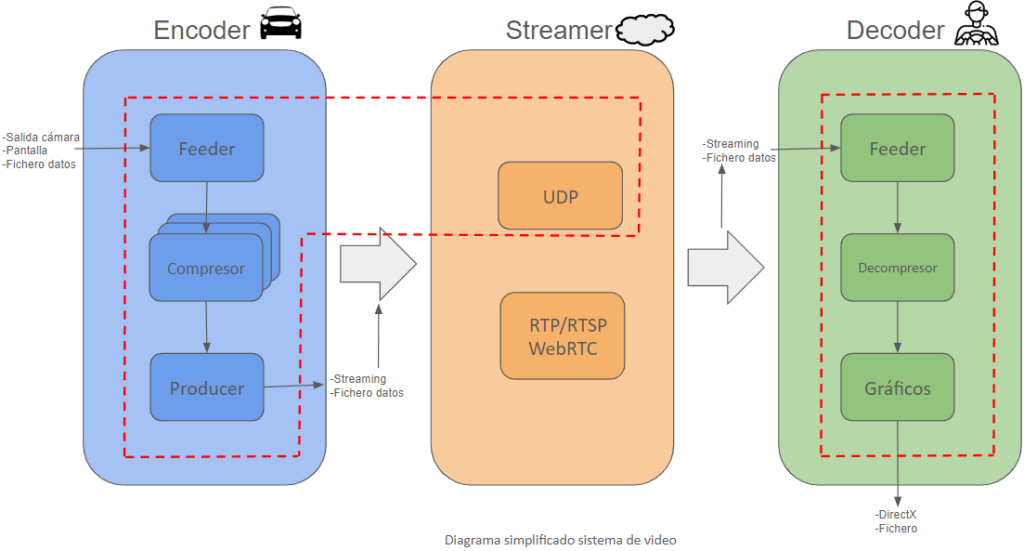
Subsistema de video:
● Coder: coder de video LHE, que en cada coche cuenta con tres fuentes de video (3 cámaras). Codifica en tiempo real y envía los flujos de video al proxy de vídeo. También recibe peticiones desde el actuador para reducir consumos o ponerse en modo “ruido” en caso de problemas de red.
● Decoder: decoder de video LHE multiflujo. aparece tanto en los puestos de conducción como en el centro de control.
● Video proxy: encargado de redirigir y duplicar los flujos de video provenientes de los coches y de redirigir las peticiones de los puestos de conducción/control hacia los coches. Se encuentra ubicado en el servidor “PROXY DE VIDEO” junto con la pila Q4S y el publicador.
● Configurador remoto: ubicado en el mismo ordenador que el coder (en el coche) permite acceder remotamente vía HTTP para configurar todos los parámetros del coder sin necesidad de ir “in situ”
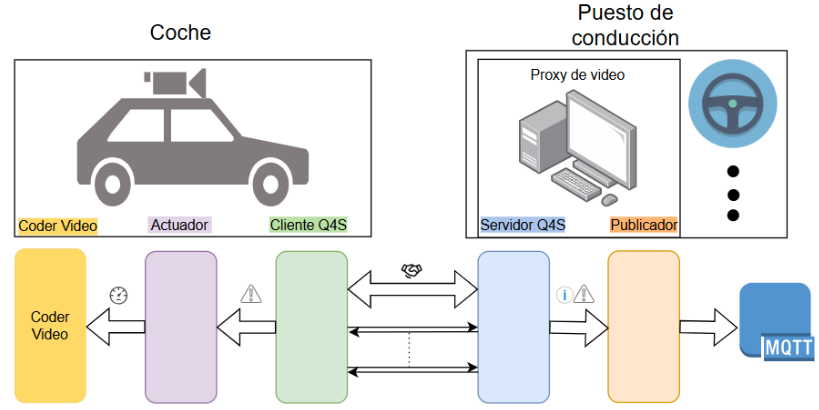
Subsistema de medición y actuación:
● Pila Q4S: Está diseñado para medir y monitorear la calidad del servicio (QoS) en una comunicación de red mediante el envío y recepción de paquetes UDP estructuradas. Se implementa un protocolo personalizado que intercambia mensajes de sicronización y medidción (SYN, ACK, PING, RESP) para evaluar parámetros críticos como latencia, jitter y pérdida de paquetes.
● Actuador: Modulo resposable de gestionar la respuesta ante condiciones adversas detectadas en la red, utilizando la información proporcionada por el módulo de medición (implementado en q4s_lite). Este componente actúa como intermedario entre la detección de anomalías y la aplicación de acciones correctivas en un dispositivo actuador, modificando parámetros de red como el ancho de banda y activando o desactivando modos de resistencia al ruido.
● Publicador: Encargado de difundir en tiempo real las métricas y alertas generadas por el nodo q4s_lite. Su objetivo es proveer retroalimentación continua al usuario, mostrando en consola los valores de latencia y pérdida de paquetes, así como notificar cuando estos superan los umbrales definidos.
● Proxy control
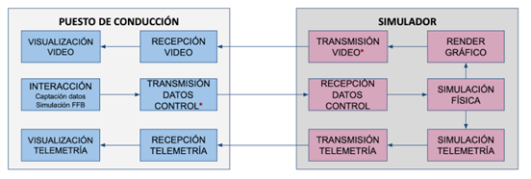
Subsistema de puesto de conducción:
● Telecontrol: Encargado de la supervisión y control remoto del vehículo. Se comunica con el vehículo para transmitir órdenes de conducción (aceleración, frenado, dirección) en tiempo real. También recibe información sobre el estado del vehículo, asegurando una respuesta rápida y precisa. Este módulo está diseñado para operar con baja latencia y alta disponibilidad, garantizando un control fluido y seguro del vehículo a distancia.
● Telemetría y calidad: Encargado de recopilar y procesar datos en tiempo real sobre el estado del vehículo. Monitoriza la calidad del enlace de comunicación, midiendo parámetros como latencia, ancho de banda y tasa de pérdida de paquetes. Los datos recopilados se envían al centro de control y pueden ser utilizados para optimizar la conducción remota y mejorar la calidad de servicio.
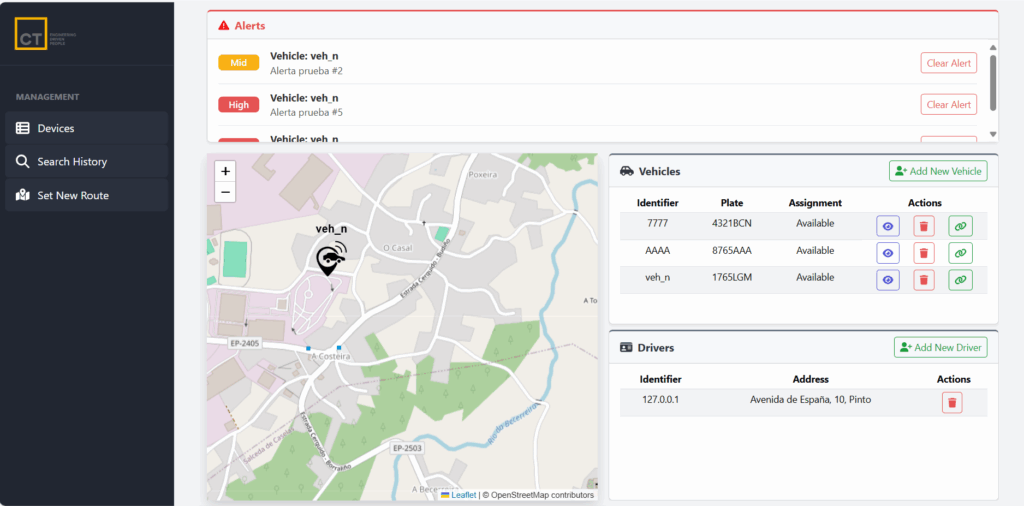
Subsistema de centro de control:
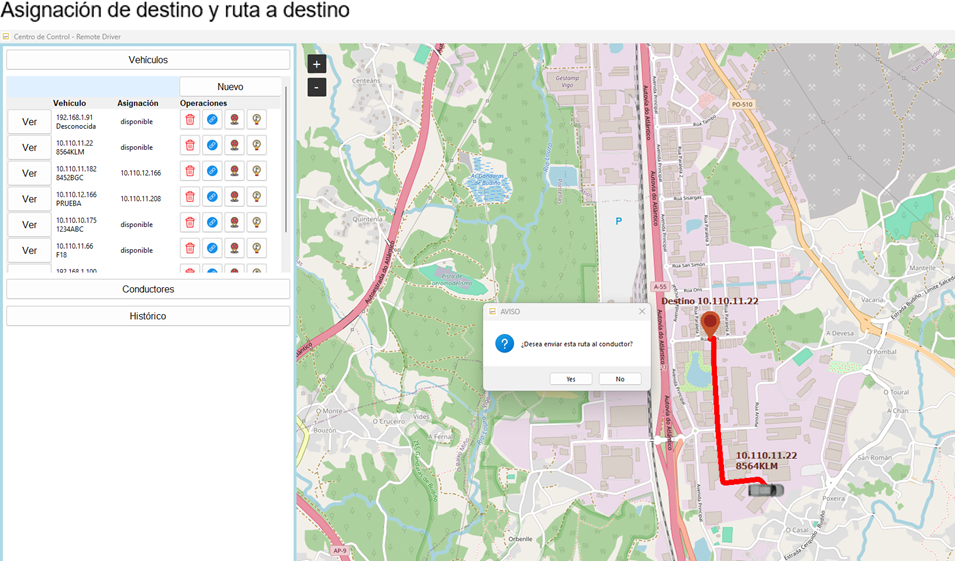
● Interoperabilidad: Utiliza MQTT para interacciones en tiempo real, como alertas, vinculación vehículo-conductor y asignación de rutas, y HTTP para recuperar datos de rutas bajo demanda, optimizando la comunicación eficiente. Esta combinación asegura una respuesta rápida y adaptable a las necesidades operativas.
● Base de datos y gestión de información: Almacena en una base de datos relacional perfiles de vehículos/conductores, rutas planificadas y registros históricos, asegurando integridad y disponibilidad para gestionar la flota. La estructura relacional permite consultas rápidas y un manejo escalable de datos.
● Gestión de alertas y reasignación dinámica: Gestiona alertas y reasigna recursos ante incidencias, con interfaces que muestran datos geoespaciales en tiempo real, facilitando decisiones rápidas y control operativo efectivo. Las herramientas geoespaciales mejoran la conciencia situacional para optimizar la respuesta.

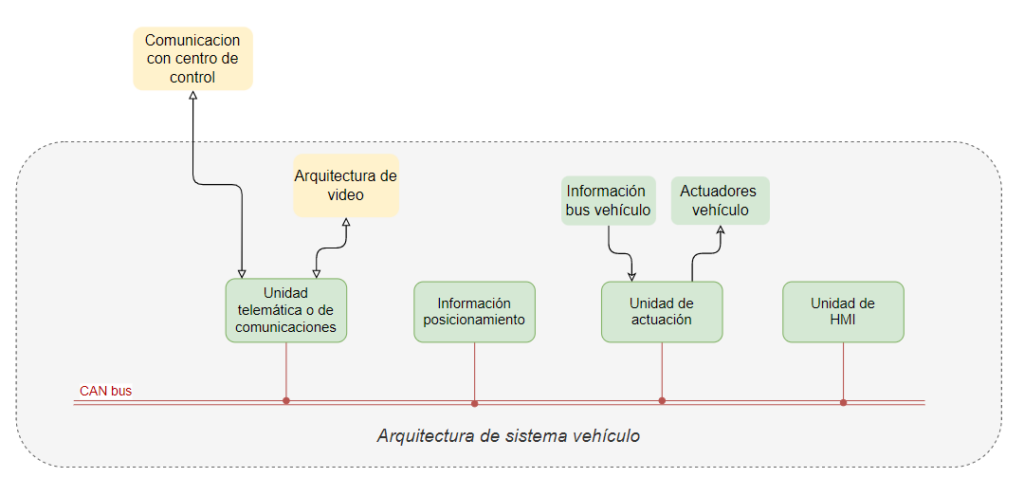
Subsistema de vehículo adaptado:
● Unidad de actuación: Unidad encargada de realizar el control lateral y longitudinal del vehículo recibiendo comandos de aceleración, frenado y ángulo de volante, traduciéndose hacia los actuadores del vehículo, además de transmitir toda la información relevante sobre los buses de comunicación vehiculares hacia nuestros sistemas de forma que tengamos información sobre velocidad, intermitentes, pulsaciones de freno, marcha engranada y todo tipo de información de dinámica vehicular, así como parámetros básicos de motor, chasis y otros elementos del vehículo… que de otro modo no serían accesibles. Se diferencian en ella los buses que se conectan al vehículo y el bus que se usa para comunicarse.
● Unidad telemática o de comunicaciones (HMCU): Unidad embarcada en el vehículo adaptado, con capacidad de comunicación celular hacia el exterior, con opción a recibir información de otros vehículos o de infraestructuras instaladas en las vías de circulación que será la encargada de las comunicaciones entre el propio vehículo, el puesto de conducción y el centro de control, de forma que independientemente de donde se encuentre el operador pueda disponer exactamente de la misma información.
● Unidad HMI: Unidad encargada de la interacción hombre-máquina responsable de dar feedback y favorecer la comunicación con el usuario y hacer la interacción fluida y segura. Dentro de esta unidad se incluirían los feedbacks que se considere relevantes para el usuario (imágenes frontales y traseras, sonidos, luces…).
Subsistema de provisión dinámica en red:
● Gestor de red (Net MQTT): MQTT es un protocolo de red ligero de publicación-suscripción de máquina a máquina para cola de mensajes/servicio de cola de mensajes. Está diseñado para conexiones con ubicaciones remotas que tienen dispositivos con limitaciones de recursos o ancho de banda de red limitado. En el proyecto, es el elemento central del subsistema de red, interactúa con el plano de control de la red 5G, con el Planificador de rutas y con el Emulador de la red. Un usuario humano (admin) puede usar una interfaz de usuario en el Gestor de red para controlar la calidad de servicio ofrecida por la red.
● Route scheduler – Planificador de rutas: su función es crear rutas para los vehículos conducidos remotamente, rutas que deben tener en consideración tanto aspectos del viaje del vehículo como de la disponibilidad de recursos de red para soportar el servicio de conducción remota.
● Red 5G – Emulador de red: una red 5G proporciona las comunicaciones entre los vehículos conducidos remotamente y el puesto de conducción. En el camino del tráfico intercambiado entre el vehículo y el puesto de conducción se situará el Emulador de red, que permite degradar el nivel de calidad de servicio (pérdidas, latencia, ancho de banda) ofrecido por la red. Se implementa como una “middlebox” que tendrá que atravesar el tráfico. El Emulador de red se controla mediante una API externa. El Gestor de red puede usar esta API para degradar de forma controlada la calidad de servicio para realizar pruebas que permitan evaluar cómo se enfrenta la arquitectura global de Remote Driver a estas situaciones.

La arquitectura del proyecto se compone de varios subsistemas interconectados que trabajan de manera coordinada para asegurar un funcionamiento eficiente y seguro del sistema global. Cada subsistema tiene una función específica, desde la captura y procesamiento de video, la medición y actuación de variables en tiempo real, hasta la adaptación del vehículo y la supervisión centralizada desde el centro de control. La interacción dinámica entre estos subsistemas permite una operación precisa, tanto para el control del vehículo como para la toma de decisiones automatizadas, garantizando una experiencia óptima y segura para el usuario.
Subsistema de video:
● Coder: coder de video LHE, que en cada coche cuenta con tres fuentes de video (3 cámaras). codifica en tiempo real y envía los flujos de video al proxy de vídeo. También recibe peticiones desde el actuador para reducir consumos o ponerse en modo “ruido” en caso de problemas de red.
● Decoder: decoder de video LHE multiflujo. aparece tanto en los puestos de conducción como en el centro de control.
● Video proxy: encargado de redirigir y duplicar los flujos de video provenientes de los coches y de redirigir las peticiones de los puestos de conducción/control hacia los coches. Se encuentra ubicado en el servidor “PROXY DE VIDEO” junto con la pila Q4S y el publicador.
● Configurador remoto: ubicado en el mismo ordenador que el coder (en el coche) permite acceder remotamente vía HTTP para configurar todos los parámetros del coder sin necesidad de ir “in situ”
Subsistema de medición y actuación:
● Pila Q4S: Está diseñado para medir y monitorear la calidad del servicio (QoS) en una comunicación de red mediante el envío y recepción de paquetes UDP estructuradas. Se implementa un protocolo personalizado que intercambia mensajes de sicronización y medidción (SYN, ACK, PING, RESP) para evaluar parámetros críticos como latencia, jitter y pérdida de paquetes.
● Actuador: Modulo resposable de gestionar la respuesta ante condiciones adversas detectadas en la red, utilizando la información proporcionada por el módulo de medición (implementado en q4s_lite). Este componente actúa como intermedario entre la detección de anomalías y la aplicación de acciones correctivas en un dispositivo actuador, modificando parámetros de red como el ancho de banda y activando o desactivando modos de resistencia al ruido.
● Publicador: Encargado de difundir en tiempo real las métricas y alertas generadas por el nodo q4s_lite. Su objetivo es proveer retroalimentación continua al usuario, mostrando en consola los valores de latencia y pérdida de paquetes, así como notificar cuando estos superan los umbrales definidos.
● Proxy control.
Subsistema de puesto de conducción:
● Telecontrol: Encargado de la supervisión y control remoto del vehículo. Se comunica con el vehículo para transmitir órdenes de conducción (aceleración, frenado, dirección) en tiempo real. También recibe información sobre el estado del vehículo, asegurando una respuesta rápida y precisa. Este módulo está diseñado para operar con baja latencia y alta disponibilidad, garantizando un control fluido y seguro del vehículo a distancia.
● Telemetría y calidad: Encargado de recopilar y procesar datos en tiempo real sobre el estado del vehículo. Monitoriza la calidad del enlace de comunicación, midiendo parámetros como latencia, ancho de banda y tasa de pérdida de paquetes. Los datos recopilados se envían al centro de control y pueden ser utilizados para optimizar la conducción remota y mejorar la calidad de servicio.
Subsistema de centro de control:
● BBDD
● Asigner
Subsistema de vehículo adaptado:
● Unidad de actuación: Unidad encargada de realizar el control lateral y longitudinal del vehículo recibiendo comandos de aceleración, frenado y ángulo de volante, traduciéndose hacia los actuadores del vehículo, además de transmitir toda la información relevante sobre los buses de comunicación vehiculares hacia nuestros sistemas de forma que tengamos información sobre velocidad, intermitentes, pulsaciones de freno, marcha engranada y todo tipo de información de dinámica vehicular, así como parámetros básicos de motor, chasis y otros elementos del vehículo… que de otro modo no serían accesibles. Se diferencian en ella los buses que se conectan al vehículo y el bus que se usa para comunicarse.
● Unidad telemática o de comunicaciones (HMCU): Unidad embarcada en el vehículo adaptado, con capacidad de comunicación celular hacia el exterior, con opción a recibir información de otros vehículos o de infraestructuras instaladas en las vías de circulación que será la encargada de las comunicaciones entre el propio vehículo, el puesto de conducción y el centro de control, de forma que independientemente de donde se encuentre el operador pueda disponer exactamente de la misma información.
● Unidad HMI: Unidad encargada de la interacción hombre-máquina responsable de dar feedback y favorecer la comunicación con el usuario y hacer la interacción fluida y segura. Dentro de esta unidad se incluirían los feedbacks que se considere relevantes para el usuario (imágenes frontales y traseras, sonidos, luces…).
Subsistema de provisión dinámica en red:
● Gestor de red (Net MQTT): elemento central del subsistema de red, interactúa con el plano de control de la red 5G, con el Planificador de rutas y con el Emulador de la red. Un usuario humano (admin) puede usar una interfaz de usuario en el Gestor de red para controlar la calidad de servicio ofrecida por la red.
● Route scheduler – Planificador de rutas: su función es crear rutas para los vehículos conducidos remotamente, rutas que deben tener en consideración tanto aspectos del viaje del vehículo como de la disponibilidad de recursos de red para soportar el servicio de conducción remota.
● Red 5G – Emulador de red: una red 5G proporciona las comunicaciones entre los vehículos conducidos remotamente y el puesto de conducción. En el camino del tráfico intercambiado entre el vehículo y el puesto de conducción se situará el Emulador de red, que permite degradar el nivel de calidad de servicio (pérdidas, latencia, ancho de banda) ofrecido por la red. Se implementa como una “middlebox” que tendrá que atravesar el tráfico. El Emulador de red se controla mediante una API externa. El Gestor de red puede usar esta API para degradar de forma controlada la calidad de servicio para realizar pruebas que permitan evaluar cómo se enfrenta la arquitectura global de Remote Driver a estas situaciones.